차량방호안전시설의 충돌시험 기준에서 참고하고 있는 SAE J211-1(REV. MAR95) 번역입니다.
(R) 충돌 시험을 위한 장비 -PART 1 - 전자 계측 장비
1. 범위 : 이 SAE의 권고 사항은 일련의 성능 권장 사항에 대해 전체 데이터 채널에 대해 적용한다. 이러한 권장 사항은 어떠한 변형을 허용하지 않으며, 시험을 수행하는 모든 기관은 이를 준수해야한다. 그러나 권장 사항 준수를 입증하는 방법은 유연하며 기관이 사용하는 특정 장비의 요구 사항에 맞게 조정할 수 있다.
각 권장 사항을 문자 그대로 받아들이도록 의도 된 것이 아니며, 권장 사항이 충족되었음을 입증하기 위해 단일 테스트가 필요하기 때문이다. 오히려 이 문서에 대한 테스트를 수행 할 것을 제안하는 모든 기관은 그러한 단일 테스트가 수행 될 수 있는 경우 해당 장비가 권장 사항을 충족 함을 입증 할 수 있어야 한다. 이 데모는 부분적인 테스트 결과 등 소유하고있는 증거의 합리적인 추론에 근거 해 실시해야 한다
일부 시스템에서는 교정 및 검사 목적으로 채널 전체를 서브 시스템으로 분리해야하는 경우가 있다. 하위 시스템의 성능이 출력 품질에 영향을 미치는 유일한 경로이기 때문에 권장 사항은 전체 채널에 대해서만 설명되어 있다. 일반적으로 채널 전체의 성능을 측정하기 어려우므로 시험 기관은 채널을 2 개 이상의 간단한 하위 시스템으로 처리 할 수 있다. 하위 시스템의 결과를 조합 한 이유와 함께 하위 시스템의 결과에 따라 채널 전체의 성능을 나타낼 수 있다.
SAE J211-1은 전자 계측장비, SAE J211-2는 영상 장비에 관해 규정한다.
1.1 목적 - 이 문서의 목적은 충격(충돌) 시험에 사용되는 측정 기술에 대한 지침과 권장 사항을 제공하는 것이다. 계측 수행과 시험 결과 보고의 균일성 달성을 목표로 한다. 이 문서를 사용하면 다양한 소스에서의 시험 결과를 의미있게 비교하기위한 기초가 제공된다.
1.2 적용 분야 - 이 문서에서 정의 된 계측은 특히 도로 차량의 충격(충돌) 시험에 적용하며, 구성 부재 및 탑승 대용(더미)을 포함한다.
2. 참조(References)
2.1 본 규정에 지정된 범위에서 확장되는 사양의 일부는 다음 목록, 특히 명기되어 있지 않는 한 SAE 출판물의 최신 개정판이 적용된다.
2.1.1 SAE PUBLICATIONS - Avaliable from SAE, 400 Commonwealth Drive, Warrendale, PA 15096-0001.
SAE J670 - Vehicle Dynamics Terminology
SAE J1727 - Injury Calculation Guidelines
SAE J1733 - Sign Convention for Vehicle Crash Testing
SAE Paper 930100
Minutes of the SAE Safety Test Instrumentation Subcommittee meetings held on April 16, September 24, November 21, 1986, and June 25, 1993
2.1.2 NHTSA PUBLICATION - Available from Department of Transportation, The Office of Crashworthiness Research, 408 7th Street SW, Washington, DC 20590.
NHTSA Data Tape Reference Guide(Version 4): Volume 1 - Vehicle Tests, Volume 2 - Biomechanics, Volume 3 - Component, and Volume 4 - Signal Waveform Generator
3. 정의(Definitions) - 3.5에서 3.14의 정의는 3.1에 정의된 전체 데이터 채널에 적용된다.
3.1 데이터 채널(Data Channel) - 단일 변환기(또는 출력이 특정 방식으로 결합되는 여러 변환기)를 포함하는 모든 장비, 주파수나 진폭 또는 데이터 타이밍을 변경할 수 있는 모든 분석 절차 포함한다. 또한, 모든 케이블 및 상호 연결을 포함한다.
3.2 변환기(Transducer) - 데이터 채널의 첫 번째 장치로 측정하려는 물리량을 이차 물리량(예 : 전압)으로 변환 한다. 변환기 동등성(Transduver Equivalency)에 대해서는 Appendix B 참조
3.3 최대 용량(Full Scale) - 데이터 채널의 최대 사용 가능한 선형 범위
3.4 데이터 채널 최대 용량(Data Channel Full Scale) - 최대 용량 수준이 가장 낮은 채널의 구성 요소에 의해 결정되는 데이터 채널의 값. 이것은 측정 된 변수(입력)로 표현된다. 예를 들면 FS=50G, 1000N, 100cm/s 등
3.5 채널 진폭 수준(Channel Amplitude Class, CAC) - 이 문서에 지정된 특정 진폭 특성을 충족하는 데이터 채널. CAC 번호는 측정 범위의 상한과 수치적으로 동일하다.(데이터 채널 최대 용량과 동일)
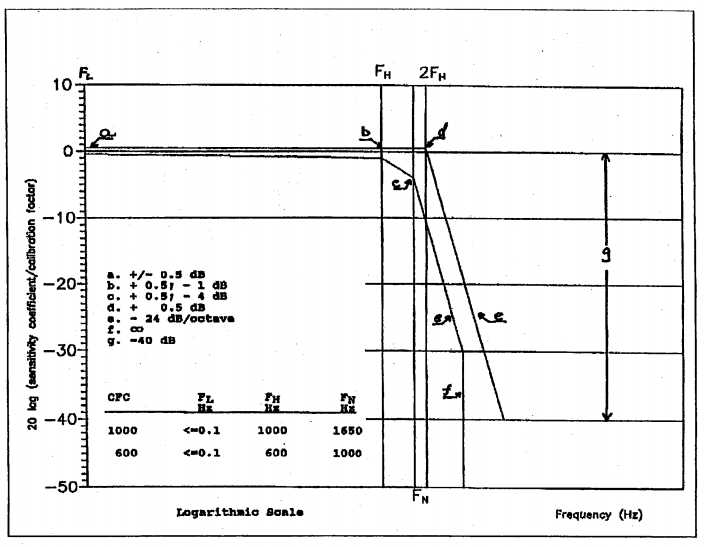
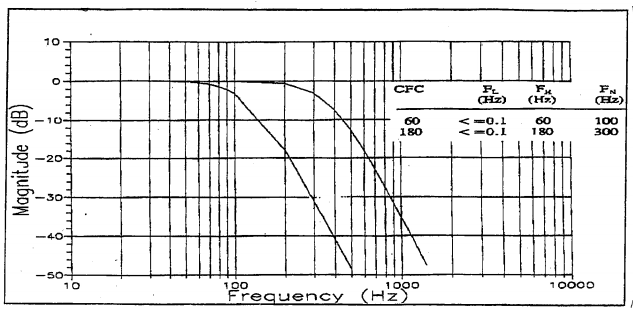
3.6 특성 주파수($F_{H}$, $F_{L}$, $F_{N}$) - Figure 1과 C1에 정의된 주파수
3.7 채널 주파수 등급(Channel Frequency Class, CFC) - 채널 주파수 등급은 채널 주파수 응답이 1,000 및 600 CFC에 대해 Figure 1에 지정된 한계 내에 있음을 나타내는 숫자로 설계된 것이다. 또는 180 및 60 CFC에 대해 부록 C에 설명된 알고리즘을 사용하여 필터링 한 것이다.
이 숫자와 값은 헤르츠 $F_{H}$ 단위의 주파수와 수치적으로 동일하다.
3.8 교정값(Calibration Value) - 데이터 채널 교정 중에 측정되고 읽은 값(See 4.6)
3.9 감도 계수(Sensitivity Coefficient) - 채널 진폭 등급의 최소 제곱 법에 의해 결정된 보정 값에 최적의 적합성을 나타내는 직선의 기울기
3.10 데이터 채널의 보정 계수(Calibration Factor of a Data Channel) - $F_{L}$과 $F_{H} / 2.5$ 사이의 로그 스케일에서 균등하게 간격을 둔 주파수에 대해 평가 된 감도 계수의 산술 평균
3.11 직선성 오차(Linearity Error) - 3.9에 정의 된 채널 진폭 등급[데이터 채널 최대 용량(Data Channel Full Scale)]의 상한에서 직선에 읽혀진 교정 값과 해당 값 사이의 최대 차이의 비율 (퍼센트)
3.12 감도(Sensitivity) - 변환기에서 적용하는 입력 신호(물리적 자극)에 대한 출력 신호(물리적 단위가 동일)의 비율(예 : 스트레인 게이지 형식의 가속도계10.24mV/G/V)
3.13 위상 지연 시간(Phase Delay Time) - 데이터 채널의 위상 지연 시간은 정현파 신호의 위상 지연(radians)과 동일하며 해당 신호의 각 주파수로 나눈다.(rad/sec)
3.14 환경(Environment) - 주어진 순간에 데이터 채널에 영향을 미치는 모든 외부 조건 및 영향의 집합
3.15 횡방향 감도(Transverse Sensitivity, 직선형 변환기) - 변환기의 정상방향에 대한 수직축의 감도
NOTE - 일반적으로 횡방향 감도는 선택한 축의 정상 방향의 함수이다.
3.16 횡방향 감도비(Transverse Sensitivity Ratio, 직선형 변환기) - 정상 축에 대한 감도와 횡방향 감도의 비율
4. 데이터 채널의 요구 성능(Data Channel Performance Requirements)
4.1 직선성 오차(Linearity Error) - 임의의 CFC 주파수에서 데이터 채널의 선형성 오차의 절대 값은 측정 범위 전체에서 CAC 값의 2.5 % 이하이어야 한다. 일반적으로, 관심 범위, 즉 $F_{L}$과 $F_{H}$ 사이의 선형성을 보장하기 위해 충분한 수의 측정을 수행해야 한다.
4.2 주파수에 대한 진폭(Amplitude Against Frequency) - 데이터 채널에 대한 주파수 응답은 CFC 1,000 및 600에서 Figure 1의 제한선이내여야 한다. CFC 180 및 60에서의 채널 주파수 응답은 Appendix C에 설명하는 필터링 알고리즘에 의해 결정한다. 0dB 라인은 보정 계수에 의해 정의된다.
4.3 위상 지연 시간(Phase Delay Time) - 데이터 채널의 입력과 출력 사이의 위상 지연 시간이 결정되어야하며, 0.03$F_{H}$와 $F_{H}$ 사이에서 $1/(10* F_{H})$ 이상 변하지 않아야한다.
4.4 시간(Time)
4.4.1 시간축(Time Base) - 시간축은 1/10,000s 미만의 오차로 최소 1/100s 해상도를 제공해야 한다.
4.4.2 상대 시간 지연(Relative Time Delay) - 주파수 등급에 관계없이 2 개 이상의 데이터 채널 신호 간의 상대적 시간 지연은 위상 편이로 인한 위상 지연을 제외하고 1ms를 초과하지 않아야 한다. 신호가 결합된 둘 이상의 데이터 채널은 동일한 주파수 등급을 가져야하며 $1/(10*F_{H})$s 보다 큰 상대적 시간 지연이 없어야 한다.
이 요구 사항은 아날로그 신호에 적용하며 동기화 펄스 및 디지털 신호에도 적용된다.
4.5 변환기 횡방향 감도비(Transduver Transverse Sensitivity Ration) - 모든 변환기의 횡방향 감도비는 모든 방향에서 5 % 미만이어야 한다.
4.6 교정(Calibration) - 이 섹션의 값은 "보정"되는 데이터 채널의 기준 장비 또는 "표준", 즉 성능이 결정되는 "표준"에 적용된다.
4.6.1 일반(General) - 데이터 채널은 알려진 표준에 따라 추적 가능한 기준 장비에 대해 최소 1년에 한 번 교정해야 한다. 기준 장비와 비교를 수행하는데 사용되는 방법은 오차가 CAC의 1%를 초과하지 않아야 한다. 기준 장비의 사용은 교정 된 주파수 범위로 제한된다.
데이터 채널의 하위 시스템은 개별적으로 평가 될 수 있으며 결과는 전체 데이터 채널의 정확도에 반영된다. 이것은 예를 들어 변환기의 출력 신호를 시뮬레이션하는 알려진 진폭의 전기 신호에 의해 확인할 수 있으며, 변환기를 제외하고 데이터 채널의 이득을 확인할 수 있다.
4.6.2 교정을 위한 기준 장비의 정확도(Accuracy Of Reference Equipment For Calibration) - 기준 장비의 정확도는 승인 된 계측 서비스에 의해 인증하거나 승인되어야 한다.(예 : 추적 가능한 국가표준기술연구소)
4.6.2.1 정적 교정(Static Calibration)
4.6.2.1.1 가속도(Accelerations) - 오차는 채널 진폭 등급의 1.5% 미만
4.6.2.1.2 힘(Forces) - 오차는 채널 진폭 등급의 1% 미만
4.6.2.1.3 변위(Displacement) - 오차는 채널 진폭 등급의 1% 미만
4.6.2.2 동적 교정(Dynamic Calibration)
4.6.2.2.1 가속도(Accelerations) - 채널 진폭 등급의 백분율로 표시되는 기준 가속도의 오차는 400Hz 미만 에서는 1.5 % 이하, 400~900Hz 사이에서는 2% 이하, 900Hz와 4.6.4를 활용한 기준 가속도의 최대 주파수 사이인 경우 2.5 % 이하.
4.6.2.2.2 힘과 변위(Force and Displacement) - (현재 만족스러운 방법이 알려져 있지 않기 때문에 힘 및 변위에 대한 데이터 채널의 교정 중 동적 응답을 평가하는 방법은 미 포함)
4.6.2.3 시간(Time) - 기준 시간에 대한 오차는 0.00001초 이하
4.6.3 감도 계수 및 직진성 오차(Sensitivity Coefficient and Linearity Error) - 감도 계수 및 직진성 오차는 이 신호의 다양한 값에 대해 알려진 입력 신호에 대해 데이터 채널의 출력 신호를 측정하여 결정된다.(입력 신호는 잘 알려진 물리적 데이터, 즉 하중 또는 가속도를 참조하지만 전압은 참조하지 않는다.)
데이터 채널의 교정은 진폭 등급의 전체 범위를 포함해야 한다.($F_{L}$과 $F_{H}/2.5$)
양방향 채널인 경우 양 및 음의 값을 모두 평가한다. 측정 할 양의 값이 너무 높아 교정 장비가 필요한 입력을 생성 할 수없는 경우, 교정 표준의 한계 내에서 기록하고 이러한 한계는 보고서에 기록한다.
총 데이터 채널은 $F_{L}$과 $F_{H}/2.5$ 사이에 중요한 값이 포함 된 주파수 또는 주파수 스펙트럼에서 교정한다.
4.6.4 주파수 응답에 대한 교정(Calibration Of The Frequency Response) - 데이터 채널에 대한 주파수에 대한 위상 및 진폭의 응답 곡선은 알려진 입력 신호에 대한 위상 및 진폭의 관점에서 데이터 채널의 출력 신호를 측정하여 결정한다. $F_{L}$과 CFC의 10배나 3,000Hz 중 작은 값에 대한 다양한 신호 값.
4.7 환경 영향(Enviromental Effects) - 환경적 영향의 존재 여부를 확인한다.(즉, 전자기, 정전기 방전, 케이블 속도 등) 예를 들어, 더미 변환기가 장착 된 예비 채널의 출력을 기록하여 확인 할 수 있다. 이러한 출력 신호가 예상 데이터 최대값의 2%보다 크면 케이블 재배치 또는 교체와 같은 수정 조치를 취한다.
4.8 데이터 채널의 선택 및 지정(Choice and Designation of the Data Channel) - CAC와 CFC는 데이터 채널을 정의
이 문서의 사양과 일치하는 데이터 채널은 다음 코드에 따라 지정 한다.
SAE J211 XXXXX - (numbers of this document)
CAC ... - (channel amplitude class)
CFC ... - (channel frequeency class)
진폭 및 주파수 응답의 교정이 교정 장비의 제한된 특성으로 인해 전체 CAC 또는 CFC를 포함하지 않는 경우 CAC 또는 CFC는 별표로 표시한다.
예,
SAE J211 XXXX
CAC* 200 $m/s{2}$
CFC 1000 Hz
이것의 의미는,
a. 이 측정은이 문서에 따라 수행되었다.
b. 채널 진폭 등급은 200 $m/s^{2}$ 이다.
c. 채널 주파수 등급은 1,000Hz 이다.
d. 진폭 응답의 교정이 전체 CAC를 포함하지 않는다.
시험 보고서에 교정 한계를 표기한다.
5. 데이터 채널 선택(Data Channel Selection) - 주파수 응답 등급의 선택은 많은 고려 사항에 따라 달라지며, 그중 일부는 특정 시험에 의해 규정한다. 데이터의 궁극적인 사용과 올바른 기술적 판단은 주파수 스펙트럼의 어떤 부분이 중요하거나 유용한지 결정한다. Figure 1 및 C1의 다양한 등급의 주파수 응답은 다양한 기술적 요구 사항에 대해 적절한 선택을 허용 하기 위한 것이다.
다른 주파수 응답 등급을 사용하는 비교는 유효하지 않을 수 있다는 점에 유의하는 것이 중요하다. 다른 소스의 시험 결과를 비교할 때 특정 주파수 응답 등급을 설정하는 것이 유용하다. 목적에 따라 Table 1의 주파수 응답 등급 사용을 권장한다. 이러한 권장 사항은 현재 관행 및 장비를 반영한 것이다. 그러나 다른 고려 사항(예, 의공학)이 특별한 계측 사항을 요구 할 수 있음을 인식해야 한다.
특정 적용분야에 대한 채널 등급 권장 사항은 해당 채널이 전달하는 모든 주파수가 적용분야에 중요하다는 것을 암시하지 않는다. 탑승자 머리 가속도, 머리 모양 가속도 및 대퇴골 힘과 같은 여러 경우에서 권장 사항은 필요 이상으로 높을 수 있다. 그러나 현재의 생체 역학적 지식은 더 근접한 사양을 제시하지 못한다. 모든 데이터는 어떤 목적으로든 1,000 등급 이상으로 수집한다.
TABLE 1 - 주파수 응답 등급
| 일반적인 시험 측정 | 채널 주파수 등급(CFC) |
| 차량 구조체 가속도 : 전체 차량 비교 충돌 시뮬레이션 입력 구성 요소 분석 속도나 변위를 위한 적분 |
60(1) 60 600 180 |
| 방호벽 표면 하중 | 60 |
| 밸트 구속 시스템 하중 | 60 |
| 의인화 시험 장비 두부 가속도(선형 및 각도) 목 힘 모멘트 흉부 척추 가속도 늑골 가속도 흉골 가속도 변형 요추 힘 모멘트 대퇴골 / 무릎 / 발목 힘 모멘트 변위 |
1,000 1,000(2)(3) 600(2)(3) 180 1,000(2) 1,000(2) 600(2)(4) 1,000(5) 1,000 600 600(2) 180(2) |
| 슬레드(주, 파형 발생기) 가속도 | 60 |
| 조향축 하중 | 600 |
| 머리 형상 가속도 | 1,000 |
| 1. 주어진 방향으로 프레임 또는 바디의 전반적인 가속도가 요구되고 더 높은 주파수 응답 등급이 필요한 경우, 서로 다른 위치에서 둘 이상의 변환기의 출력을 평균화하여 데이터의 가독성을 향상 할 수 있다. 2. Appendix A, A.4 참조 3. 이러한 분류는 하이브리드 III 충돌 테스트 더미를 사용할 때 목 힘과 머리 가속도를 기반으로 머리 충격력을 계산하는 데 필요하다. 4. SAE Paper 930100 참고 5. 분류에 대한 근거가 없다. 기본적으로 1,000 등급이 선택 |
|
6. 변환기 장착(Mounting of Transducers) - 변환기 장착과 관련된 기계적 공진이 판독 데이터를 왜곡해서는 안된다.
더미에 장착하는 변환기는 목적을 위해 특별히 제공된 지지대를 사용한다. 비 기계적 시험 대상의 특성으로 인해 견고한 변환기 장착이 불가능한 경우, 장착 효과에 따른 데이터에 대한 해석적 또는 실험적 평가가 제공되어야 한다.
특히 가속도 변환기는 측정하고자 하는 기준축과 설치된 기준축 사이의 초기 각도 차이가 5도를 넘지 않도록 설치해야 하며, 이 경우 해석적 또는 실험적 평가는 필요없다. 한 지점에서 다축 가속도를 측정 할 때 각 가속도 변환기는 지점에서 10mm 이내로 하며, 각 가속도계의 센서 질량 중심은 해당 지점에서 30mm 이내로 한다.
7. 부호 규약(Sign Convention) - 서로 다른 충돌 테스트 시설에서 얻은 테스트 결과를 비교하려면, 더미 충돌 시험, 차량 구조체 및 실험실 설비에 대해 표준화된 좌표계를 정의한다. 또한 다양한 변환기 출력에 대해 기록된 극성을 적절한 좌표계의 양의 방향과 관련하여 정의한다. 이 섹션에서는 부호 규약에 대한 표준에 대해 기술한다.
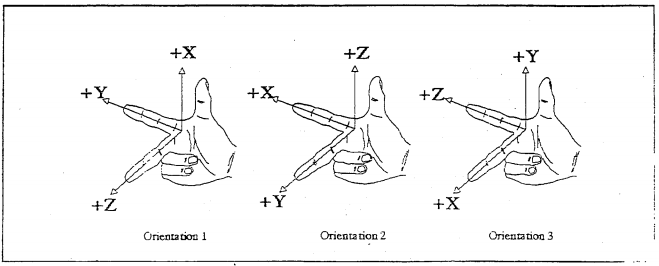
7.1 오른손 좌표계(Right-Handed Coordinate System) - 벡터 곱에 의해 생성되는 모멘트와 각속도 및 가속도의 일관된 벡터 방향을 보장하기 위해 차량 시험에서 사용되는 모든 좌표계는 "오른손"이다. 오른손 좌표계는 3개(x, y, z)의 상호 수직으로 정렬된 축 세트로 구성된다. 이러한 축은 Figure 2와 같이 공통 원점에 대해 오른손의 엄지, 검지, 그리고 중지에 의해 양의 방향이 정렬된다. Figure 2의 방향 1, 2 및 3에 나타낸 바와 같이, 엄지, 검지 또는 중지 중 하나의 방향을 x축으로 정의하도록 선택할 수있는 점에 유의한다. 그러나 이 결정이 내려지면 y및 z축의 양의 방향은 Figure 2에 표시된 해당 방향으로 표시해야 한다.
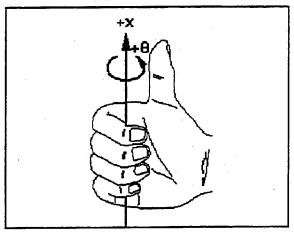
양의 각 운동 및 모멘트 방향은 오른손 나사 규칙에 의해 결정된다. Figure 3과 같이 엄지가 양의 방향으로 뻗은 상태에서 오른손으로 양의 축을 잡으면 손가락이 감긴 방향이 각 운동과 모멘트에 대한 양의 방향을 나타낸다.
좌표계(x, y, z)가 오른손인지 확인하는 간단한 방법은 오른손 나사 규칙을 사용하여 z축을 기준으로 시스템을 90도 회전하는 것이다. 양의 x축이 이전에 정의한 y축으로 사용되던 위치로 회전하는 경우, 시스템은 오른손 좌표계 이다.
7.2 차량 및 실험실 좌표계(Vehicle and Laboratory Coordinate System) - 차량 및 실험실 좌표계의 경우 양의 z축은 아래쪽으로, 양의 x축은 차량을 기준으로 앞쪽으로, 양의 y축은 차량 왼쪽에서 오른쪽으로 향한다.(see SAE J760) 스티어링 휠 및 축과 같은 주 운동 축이 있는 차량 내 구조물의 경우, 차량 좌표계는 양의 x축이 칼럼 축을 따라 향하도록 y축을 중심으로 회전 한다.
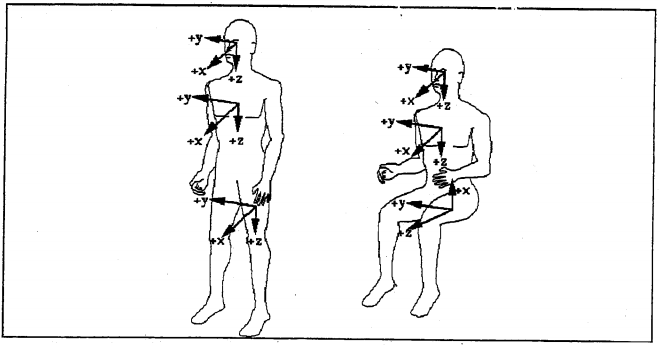
7.3 더미 좌표계(Dummy Coordinate Systems) - 좌표계는 더미의 모든 지점에 부착 될 수 있다. 좌표축의 방향을 결정하기 위해 더미는 항상 똑바로 서있는 것으로 한다. 이 자세에서 양의 y축은 더미의 왼쪽에서 오른쪽으로 향하고, 양의 z축은 머리에서 발끝으로 아래로 향하고, 양의 x 축은 앞쪽으로 향한다. 해부학적 용어로 양의 x축은 후방에서 전방(P-A)으로, 양의 y축은 왼쪽에서 오른쪽(L-R), 양의 z 축은 상부에서 하부(S-I) 이다. Figure 4는 몇 개의 바디 포인트에 부착 된 좌표계에 대한 표준화 된 방향의 예를 보여준다. 더미를 차량에 안착시키기 위해 관절로 연결된 부분이 회전하는 경우 연결된 좌표계는 더미 부품과 함께 회전한다.
7.4 가속, 속도 및 변위의 극성(Polarities of Acceleration, Velocity and Displacement) - 이러한 변환기에 대한 양의 값으로 기록된 출력은 측정중인 특정 더미 또는 차량 지점에 대해 정의 된 좌표계의 양의 축과 일치해야 한다. 예를 들어, 더미의 머리 뒤쪽에 타격하면 정방향(+x)으로 가속도가 생성되며 이는 양의 가속도로 기록되어야 한다. 머리 꼭대기에 타격을 가하면 + z 가속, 왼쪽에 타격을 가하면 +y 가속이 생성된다.
변위의 경우 관심 좌표계를 정의해야 한다. 예를 들어, 복장뼈 가슴 압박은 흉골이 흉추를 기준으로 움직이는 거리다. 이 경우 좌표계는 흉추에 고정된다. 흉골이 척추에 가까워 질 때, 변위는 음의 x방향으로 척추에 비해 후방으로 발생한다. 따라서 전면 흉부 극성은 음의 압박이다. 측면 흉부 압박의 경우, 흉부의 왼쪽에 타격을 가하면 흉추에 대해 갈비뼈는 양의 변위가 생성된다. 무릎 전단 변환기에 의해 측정된 대퇴골에 대한 경골의 후방 변위는 음의 x방향이다. 이 동작의 극성은 음의 값이어야 한다.
7.5 측정된 외력의 극성(Polarities of Measured External Loads) - 더미 또는 차량 구조체에 직접 작용하는 하중을 측정하는 로드셀의 경우 기록된 출력 극성은 하중 작용 지점에서 표준화된 좌표계를 참조하여 적용된 외부 하중의 방향과 일치해야 한다. 예를 들어, 쇄골의 어깨 벨트 하중을 측정하는로드셀은 쇄골에 작용하는 Fx 및 Fz를 측정하도록 설계되었다. 각각의 더미에 대해 작용한 힘에 대한 양의 방향은 전방(+x) 및 하향(+z)이다. BIOSID(주, 측면 충돌 더미)의 경우 왼쪽 장골 꼭대기에 적용되는 측면 내부 하중은 양 (+ y)이 되고, 오른쪽 장골 꼭대기에 적용되는 측면 내부 하중은 음 (-y)이다.
7.6 측정된 내력의 극성(Polarities of Measured Internal Loads) - 더미 내부의 하중을 측정하는로드셀에 대해 기록된 출력 극성을 정의하려면 표준화된 더미 단면 체계와 내부 하중이 동일한 크기이지만 반대 방향인 쌍으로 발생하므로 더미 부품에 대한 양의 방향의 정의가 필요하다. 표준화 된 단면 체계는 Figure 5에 표시된 정육면체의 자유 물체도로 설명 된다. 대상 로드셀이 큐브 내에 포함되어 있고 큐브 표면에 가해지는 하중에 반응한다고 가정한다. 로드셀 출력은 수직 하중, 전단 하중, 토크 또는 모멘트가 표준화된 좌표계에 정의된대로 큐브의 오른쪽, 전면 이나 혹은 바닥 표면에 양의 방향으로 적용될 때 양의 극성으로 기록되어야 한다. 이러한 하중은 실선 화살표로 표시하였다. 정적 평형의 경우 점선 화살표로 표시된 큐브의 왼쪽, 후면 이나 혹은 상단 표면에 동일한 크기이지만 반대 방향 (음의) 방향 하중을 가해야한다. 예를 들어, 위나 아래 목, 요추, 위 및 아래 경골 로드셀은 더미가 해당 로드셀 아래 섹션으로 나뉘고 해당 로드셀의 바닥 표면에 양의 하중이 적용될 때 양으로 기록된 출력을 가져야 한다. 특정 더미 로드셀에 요구되는 극성 기록 특성은 자유물체도에서 하중 시스템을 보여주며, 더미 사용자 매뉴얼과 SAE J1733에 나와 있다.

Notes for Figure 5:
1. 로드셀의 주축은 국부 더미 좌표계의 각 축에 평행하게 정렬된다.
2. 수직력 (F), 전단력 (S) 및 모멘트 (M)의 굵은 화살표는 양의 방향이다. 이러한 양의 하중은 큐브의 전면, 오른쪽 및 바닥 표면에 적용된다. 점선 화살표는 정적 평형을 위해 뒤쪽, 왼쪽 및 상단에 적용된 하중의 방향을 나타낸다.
7.7 측정 하중의 극성을 확인을 위한 더미 조작(Dummy Manipulations for Checking Polarities of Measured Loads) - Table 2에는 더미 조작에 대한 설명과 더미에 사용되는 일반적인 로드셀에 대한 출력의 해당 극성이 포함되어 있다. Table 2에 나열되지 않은 로드셀의 극성을 확인하기 위한 조작은 사용중인 특정 더미의 사용 설명서 또는 SAE J1733에서 찾을 수 있다.
TABLE 2 - DUMMY MANIPULATIONS FOR CHECKING RECORDED LOAD CELL POLARITY RELATIVE TO SIGN CONVENTION
| 로드셀 | 측정 | 더미 조작 | 극성 |
| 상부 및 하부 목 하중 | Fx | Head rearward, chest forward | + |
| Fy | Head leftward, chest rightward | + | |
| Fz | Head upward, chest downward | + | |
| Mx | Left ear toward left shoulder | + | |
| My | Chin(턱) toward sternum(복장뼈, 가슴뼈) | + | |
| Mz | Chin toward left shoulder | + | |
| 왼 어깨 하중(BIOSID) | Fx | Left shoulder forward, chest reaward | + |
| Fy | Left shoulder rightward, chest leftward | + | |
| Fz | Left shoulder downward, chest upward | + | |
| 오른 어깨 하중(BIOSID) | Fx | Right shoulder forward, chest reaward | + |
| Fy | Right shoulder rightward, chest leftward | + | |
| Fz | Right shoulder downward, chest upward | + | |
| 쇄골 하중 | Fx | Shoulder forward, chest rearward | + |
| Fz | Shoulder downward, chest rearward | + | |
| 상부 및 하부 요추 | Fx | Chest rearward, pelvis(골반) forward | + |
| Fy | Chest leftward, pelvis rightward | + | |
| Fz | Chest upward, pelvis downward | + | |
| Mx | Left shoulder toward left hip | + | |
| My | Sternum toward front of legs | + | |
| Mz | Right shoulder forward, left shoulder rearward | + | |
| 천골(엉치뼈) 하중(BIOSID) | Fy | Left H-point pad leftward, chest rightward | + |
| 왼 장골(iliac) 하중(BIOSID) | Fy | Left iliac rightward, chest leftward | + |
| 오른 장골(iliac) 하중(BIOSID) | Fy | Right iliac rightward, chest leftward | + |
| 치골(두덩뼈, Pubic) 하중 (측면 충돌) |
Fy | Right H-point pad leftward, left pad rightward | (-) |
| 가랑이 밸트 하중 | Fx | pubic rearward, pelvis forward | (-) |
| Fz | pubic upward, chest downward | (-) | |
| 장골 좌석 밸트 | Fx | Upper iliac spine rearward, chest forward | (-) |
| My | Upper iliac spin rearward, chest forward | + | |
| 왼측 복부 하중 (Eurosid-1) |
Fy | Left side of abdomen(복부) rightward, chest leftward | + |
| 오른측 복부 하중 (Eurosid-1) |
Fy | Right side of abdomen(복부) leftward, chest rightward | (-) |
| 대퇴골 하중들(좌석에 안착된 더미, 수평 대퇴골) | Fx | Knee upward, upper femur(대퇴골) downward | + |
| Fy | Knee rightward, upper femur leftward | + | |
| Fz | Knee forward, pelvis rearward | + | |
| Mx | Knee leftward, hold upper femur in place | + | |
| My | Knee upward, hold upper femur in place | + | |
| Mz | Tibia(경골) leftward, hold pelvis in place | + | |
| 무릅 U링크(clevis) | Fz | Tibia downward, femur upward | + |
| 상부 경골 하중 | Fz | Tibia downward, femur upward | + |
| Mx | Ankle leftward, hold knee in plase | + | |
| My | Ankle forward, bottom of knee clevis rearward | + | |
| 하부 경골 하중 | Fx | Ankle forward, knee rearward | + |
| Fy | Ankle rightward, knee leftward | + | |
| Fz | Ankle downward, knee upward | + | |
| Mx | Ankle leftward, hold knee in place | + | |
| My | Ankle forward, bottom of knee clevis rearward | + |
8. 기록(Recording)
8.1 아날로그 자기 기록기(Analog Magnetic Recorder) - 테이프 속도는 사용된 테이프 속도의 0.5% 미만으로 안정적 이어야한다. 레코더의 신호 대 잡음비(S/N)는 최대 테이프 속도에서 42dB 이상이어야 한다.
총 고조파 왜곡은 3% 미만이어야하며 선형성 오류는 측정 범위의 1% 미만 이어야한다.
표준 테이프 속도 사용을 권장한다 : 15/16, 1-7/8, 3-3/4, 7.5, 15, 30, 60, 120 ips(inches per second). IRIG(Inter-Range Instrument Group) 사양을 준수하는 것이 바람직 하다.
8.2 디지털 자기 기록기(Digital Magnetic Recorder) - 테이프 속도는 사용된 테이프 속도의 10% 미만으로 안정적이어야한다. 표준 테이프 속도 사용을 권장한다 : 75 or 100 ips. 7 또는 9 트랙 형식에서 테이프는 너비가 0.5이고 표준 800,1600 또는 6250 bpi(bits per inch)로 기록한다.
8.3 종이 테입 기록기(Pater Tape Recorder) - 직접 데이터를 기록하는 경우, 용지 속도는 mm/sec로 Hz 단위로 표현하는 $F_{H}$의 1.5배 이상이어야 한다. 이외의 경우 용지 속도가 동등한 해상도를 얻을 수 있어야 한다.
9. 디지털 데이터 처리(Digital Data Processing) - 이 섹션에서는 충돌 시험 기관에서 사용하는 디지털 데이터 처리 장비에 대한 지침을 설정한다.
9.1 사전 샘플 필터링(Presample Filtering) - 데이터 채널 수준의 주파수에 해당하는 필터링은 데이터 처리 중에 수행 될 수 있다.
그러나, 저장 전에 레코더의 동적 범위의 50 % 이상을 사용하고 레코더의 고주파 포화 위험을 줄이기 위해 CFC-1000 보다 높은 수준의 아날로그 필터링을 수행한다. 충돌 시험 데이터는 채널 등급 $F_{H}$보다 높은 고주파 성분을 가질 수 있으므로, 구성 요소가 샘플링 프로세스에서 앨리어싱 오류를 일으키지 않도록 사전 샘플 필터링을 사용해야 한다. 필터링 프로세스가 특정 과부하 조건을 차폐할 수 있으므로 사용자는 필터링되지 않은 데이터에서 신호 과부하를 검사해야한다. 디지털 필터링은 데이터 채널당 한 번만 수행해야 한다. 즉, 디지털 필터링 된 신호를 다시 디지털 필터링하면 안된다.
$F_{H}$ 주파수에서 앨리어싱에 의해 유도된 최대 오류는 CAC의 0.1 %를 초과할 수 없다.
9.2 샘플링 속도(Sampling Rate) - 최소 허용 샘플링 속도는 많은 변수의 함수이며, 특히 처리 소프트웨어에 사용되는 재구성 방법의 정교함에 영향을 받는다. 단순한 재구성 소프트웨어를 사용하는 경우 샘플 속도는 FH$F_{H}$의 최소 10배 이상이여야 한다. 채널 1000 수준의 사전 샘플 필터가 설치된 경우 채널당 초당 약 10,000 샘플의 최소 샘플링 속도에 해당한다. 아날로그 기록의 경우 기록 및 재생 속도가 다른 경우 샘플링 주파수를 속도 비율로 나눌 수 있다.
9.3 해상도(Resolution) - 데이터 처리에서 합리적인 정확성을 보장하려면 최소 10비트(부호 포함)를 사용해야 한다. 데이터의 동적 범위가 A/D 변환기 용량(full scale)의 50% 미만인 시스템에서는 더 높은 해상도가 필요할 수 있다. 최초 비트는 CAC의 약 0.2%에 해당 한다.
9.4 데이터 처리(Data Processing) - 일반적으로 데이터 처리 소프트웨어는 데이터의 스케일(scale)링, 필터링, 영점 조정, 수학적 연산 및 데이터 출력 형식을 준비하는데 사용된다.
9.4.1 디지털 필터링(Digital Filtering) - 필터링은 위상 이동(편이) 또는 위상을 없앨 수 있다. 위상 이동 필터는 시간 오프셋, 위상 제거 필터는 시간 불확실성이 원인이다; 데이터를 영상과 비교하거나 필터 수준이 다른 경우 데이터들을 비교하는 데 문제 중 하나를 일으킬 수 있다. 필터링은 벡터 합 및 부상 지수 계산과 같은 모든 비선형 연산에 앞서 수행해야한다. 섹션 4에 제공된 데이터 채널 성능 요구 사항을 준수하는 결과를 제공하는 한 CFC 1000 또는 600의 모든 필터링 알고리즘을 사용할 수 있다. 사용된 디지털 필터 유형을 보고해야 한다. CFC 180 또는 60의 경우 부록 C에 설명된 디지털 버터워스 필터를 사용해야 한다.
9.4.2 스케일링 및 영점조정(Scaling And Zeroing) - 설정된 이득에 따라 제로 드리프트가 없을 것으로 예상되지 않는다면 소프트웨어를 사용하여 영점 및 보정 계수를 결정해야 한다. 직교 성분의 영점 옵셋 오류는 계산 결과에서 유사한 오류가 발생하지만 종종 발견이 어렵다.
9.4.3 상해 지수 계산(Injury Index Calculations) - 상해 지수 계산은 모든 데이터의 측정 포인트에 대해 수행해야 한다. 다양한 상해 지수에 대한 상세한 설명은 SAE J1727을 참고한다.
10. 시간 표기(Timing Marks) - 타이밍 마크는 고속 영상과 다른 데이터 채널의 데이터 분석 및 상관 관계에 있어 필수적이다. 타이밍 주파수 오차는 선택되거나 지정된 주파수의 1% 미만이어야 한다. 타이밍 동기화는 ±1ms 이내 여야 한다.
11. 접촉 시간(Time of Contact) - 최초 접촉 시간(실제 또는 시뮬레이션)은 ±1ms 이내에 알고 있어야하며 충격에 의해 작동되는 스위치나 시험에서 미리 결정된 가속도 값(예 : 0.5g)을 초과하는 순간을 포착하여 규정할 수 있다. 또한 스트로브 라이트(발광 조명) 또는 타이밍 마크 채널을 통해 영상 데이터에 기록한다.
12. 결과 보고(Presentation of Results) - 시험 결과 보고시에는 데이터 표, 시간 이력 추적 등과 함께 다음 정보를 제공해야한다.
a. 데이터 채널 지정
b. 지정된 기준점 및 차량 가속도계 위치에 대한 설명
c. 변환기 장착 분석(섹션 6에서 요구하는 경우)
d. 사용된 디지털 필터의 형식
e. 교정을 위해 하위 시스템을 결합한 방법
f. 관성 좌표계 정의
결과는 A4(210mm×297mm) 규격 용지(ISO 216)나 8.5in×11in 용지를 사용하여 기록한다. 그림(그래프)으로 나타나는 결과는 선택한 단위의 적절한 배수(예, 1, 2, 5, 10, 20mm)에 해당하는 하나의 측정 단위로 스케일링 된 축을 가지고 있어야 한다. 차량 속도는 km/h와 충돌(충격)에 의한 가속도는 G를 사용하는 것을 제외하고는 SI 단위를 사용해야 한다.(G=9.81m/s/s)
13. 디지털 데이터 표준화(Standardization of Digital Data) - 데이터 교환을 위해서 데이터 형식은 NHTSA 형식을 따른다. 이 형식에 대한 문서는 Office of Crashworthiness Research(NHTSA)를 통해 소액의 비용으로 제공된다.(202-366-4850) 문서 제목은 NHTSA 데이터 테이프 참조 안내(Version 4) : Volume 1 - Vehicle Tests, Volume 2 - Biomechanics, Volume 3 - Components, and Volume 4 - Signal Waveform Generator.
14. 주의(Notes)
14.1 한계 표기(Marginal Indicia) - 왼쪽 여백에 있는 변경 막대(I)는 보고서의 이전 호에 대해 기술적으로 수정된 영역을 사용자가 쉽게 찾을 수 있도록하기위한 것이다. 문서 제목 왼쪽의 (R) 기호는 보고서의 전체 개정을 나타낸다.
SAE 안전 시험 계측 표준위원회 작성
APPENDIX A
특정 측정(SPECIFIC MEASUREMENTS)
A.1 충돌 속도(Impact Velocity) - 충돌 전에 알려진 거리를 횡단하는 데 필요한 시간을 측정하여 계산할 수 있다. 충돌 속도의 측정은 실제 속도의 1% 미만의 오차로 이루어져야 한다.
A.2 시험체 변형(Test Specimen Crush)
A.2.1 잔류 변형(Residual Crush) - 잔류 변형은 지정된 포인트에 대해 하나 이상의 단일 값의 데이터 요소에 의해 지정된다. 잔류 변형의 결정은 실제 변형의 5% 미만의 오차로 측정해야 한다.
A.2.2 동적 변형(Dynamic Crush) - 최대 동적 변형는 충돌 중 시험편의 최대 변형을 측정 한 것이다. 이 또한 하나 이상의 지정된 기준점과 관련하여 측정한다. 시편의 크기와 예상되는 동적 변형의 크기에 따라 가능한 측정 방법은 다음과 같다.
a. 초고속 거동 사진
b. 가속도의 이중 적분
c. 특정 변위 변환기 사용
측정 오차는 실제 변형의 5% 이하여야 한다.
A.3 조향축 변위(Steering Column Displacement) - 차량의 지정된 기준점에 대한 변위는 다양한 기술로 측정 할 수 있다. 변위를 측정하는 좌표계를 표시해야 한다. 조향축 변위의 정확도는 ±0.5in(±1.27cm)로 한다.
A.4 참조(References) - 지정된 필터 주파수 등급 중 일부의 정당성과 관련된 정보는 1986년 4 월 16일, 9월 24일, 1986 년 11월 21일 및 1993년 6월 25일에 개최 된 SAE 안전 테스트 계측 소위원회 회의록에 포함되어 있다.
APPENDIX B
변환기 동등성(TRANSDUCER EQUIVALENCY)
B.1 데이터 채널 구성을 선택하는 과정에서 변환기 선택은 우선적으로 고려해야 할 대상이다. 또한 변환기의 범주에 포함되는 다양한 변환기(즉, 가속도, 압력, 힘, 변위 등)가 점점 확대되고 있으며, 특정 응용 분야에서 다양한 변환기 성능의 동등성 및 상관 관계에 대해 고려해야 한다. 변환기는 데이터 채널의 필수 부분을 담당하므로, 섹션 4에 설명 된대로 전체 데이터 채널 성능 요구 사항을 고려할 때 변환기 관련 요소의 오차 기여도를 포함해야 한다.
SAE J211의 목적은 "다른 소스의 시험 결과를 의미있게 비교하기 위한 기초"를 제공 할 "충돌 시험에 사용되는 측정 기술"을 권장하는 것이다. 이것은 다양한 변환기 유형에 대한 성능의 동등성을 입증하는 것이 목적이다. 변환기 범주와 관련하여 고려되는 이러한 목적은 측정 대상 및 환경에 대한 지식을 통해 요구된다. 변환기 제작 또는 설계의 기술적 제약에 의해 반드시 제한되지는 않지만 충돌 하중 조건하에서 과도 응답과 정상 응답 모두에 반드시 연결된다.
정상 상태 및 과도 응답 모두 변환기 특성 또는 사양의 조합에 따라 성능이 달라진다. 변환기 특성의 상호 작용은 유사한 사양을 가진 변환기 간의 정상 상태 및 과도 응답 모두에서 상당한 차이를 유발할 수 있다. 사용자는 동등성 입증을 위해 결합된 성능을 반드시 확인해야 한다.
변환기 에러의 잠재적 원인은 데이터 채널 호환성(즉, 변환기가 안티 앨리어싱 필터의 업스트림 데이터 채널의 나머지 부분과 부정적으로 상호 작용할 수 있다.)과 관련이 있다. 예 : 공진(resonance) / 감쇠(damping) 영향. 다른 오차 원인은 환경 접합성과 관련이 있다. 즉, 온도 드리프트를 포함하는, 자기 및 전기 필드 효과 등 및 변환기 크기, 무게, 센서 질량 위치, 횡방향 감도, 게이지 크리프 등을 포함하는 비 측정 영향 및 상호 작용. 따라서 사용자는 동등성 입증시 데이터 채널과 환경 접합성을 확인해야 한다.
동등성 입증(전체 데이터 채널에 대해 SAE J211에서 권장하는 오차 허용 범위 이내인 것을 확인)을 위해 고려중인 변환기가 적용하고자 하는 응용 분야에 유사한 결과를 산출하는지 확인 시험을 수행하는 것은 사용자의 책임이다.
사용자는 동등성에 대한 최소 초기 기준으로 목적 대상 측정 분야의 정상 상태 및 동적 교정 스펙트럼을 복제하는 기술을 고려해야 한다. 사용자는 비교 교정에서 CAC에서 최소 절반의 진폭에 대해 CFC 차단 주파수($F_{N}$, Figure 1)의 최대 2배 이상을 포함하는 스펙트럼에 대해 고려해야 한다. 두 변환기의 동일한 주파수 범위에서 전달 함수 간의 응답 진폭 차이는 0.5dB를 초과하지 않아야 한다. 위상 지연은 4.3에 설명 된 데이터 채널 요구 사항에 따른다. 사용자는 실제 시험 조건을 나타내는 관심 분야의 CFC의 주파수를 시뮬레이션하는 구성 요소 수준의 시험에서 변환기를 연속(back-to-back) 및/또는 나란히(side-by-side) 사용하는 것을 고려한다.
가능한 경우 동등성 확인을 위해 변환기를 주어진 측정 분야에 대한 실제 시험 조건에서 연속 및/또는 나란히 사용할 수 있다. 결과를 검증하기 위해 통계적으로 유의 한 수의 시험을 수행해야 한다. 이 방법은 해당 변환기 유형의 동적 응답을 검증하기 위한 보정 방법이없는 경우에도 사용할 수 있다.
APPENDIX C
버터워즈 4극 위상 디지털 필터(BUTTERWORTH 4-POLE PHASELESS DIGITAL FILTER)
C.1 표본 데이터를 필터링하는 절차에 사용되는 차분 방정식으로 Figure C1과 같이 진폭 대 주파수 응답 곡선이 나타난다. 시간 영역의 차분 방정식은 다음과 같은 형식을 갖는다. :
$Y[t] = a_{0} X[t] + a_{1} X[t-1] + a_{2} X[t-2] + b_{1} Y[t-1] + b_2 Y[t-2]$ (Eq. C1)
여기서,
$X[t]$는 입력 데이터 흐름
$Y[t]$는 출력 데이터 흐름
$a_{0}$, $a_{1}$, $a_{2}$, $b_{1}$, $b_{2}$ 는 아래의 CFC에 따른 계수
$T$ = 초당 샘플링 간격
$w_{d} = 2 * \pi * CFC * 2.0775$
$w_{a} = sin(w_{d}\frac{T}{2}) / cos(w_{d} \frac{T}{2})$
$a_{0} = \frac{w_{a}^{2}}{1.0+ \sqrt{2} * w_{a} + w_{a}^{2}}$
$a_{1} = 2*a_{0}$
$a_{2} = a_{0}$
$b_{1} = \frac{-2*(w_{a}^{2} -1)}{1+\sqrt{2}*w_{a}+w_{a}^{2}}$
$b_{2} = \frac{-1+\sqrt{2} * w_{a} - w_{a}^{2}}{1+\sqrt{2}*w_{a}+w_{a}^{2}}$
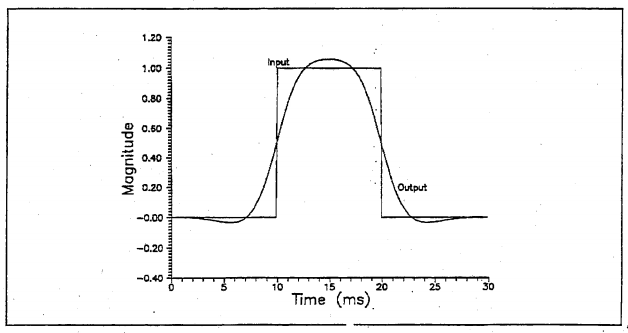
Equation C1은 2극용 필터 이다. 4극 필터를 만들기 위해서는 데이터가 필터를 두 번 통과하게 한다. 필터를 통해 데이터를 앞뒤로 전달하면 필터가 데이터 위상을 이동시키지 않는다. 필터링 된 데이터 세트의 최대값은 필터링되지 않은 데이터의 최대값과 동시(같은 시간)에 발생 한다. 그러나 데이터 세트에 계단 또는 빠른 상승의 파형이 포함 된 경우 필터링 된 출력에는 필터링되지 않은 데이터의 실제 이벤트 전후의 데이터가 포함되야 한다. 이것은 Figure C2에 표시된 필터의 펄스 응답과 같다. 데이터가 앞뒤로 전달되는 경우 필터는 동일한 결과를 생성한다. 자료 정리 시스템에서 구현하기 가장 쉬운 방법(전방/후방 또는 후방/전방)을 결정하는 것은 사용자의 몫이다.
디지털 필터의 시작은 동일한 신호를 아날로그 필터와 통일한 응답이 발생하도록 전환하는 것이다. 디지털 필터 알고리즘은 0이 아닌 초기 데이터를 계단 함수로보고, 이것의 일반적인 부족 감쇠의 2차 응답이다. 필터링 할 데이터 세트에 충분한 이벤트 이전 및 이후 데이터가 포함 된 경우, 이벤트가 시작되기 전에 초기 단계 입력에 대한 필터 응답이 감쇠되므로 초기 조건을 무시할 수 있다.
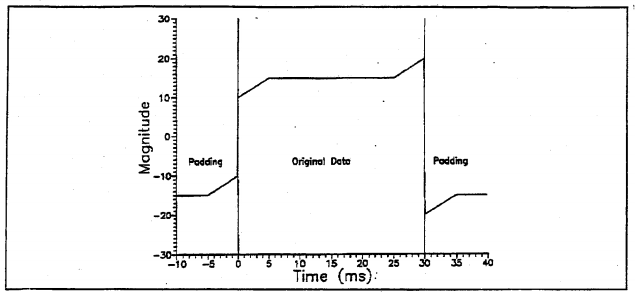
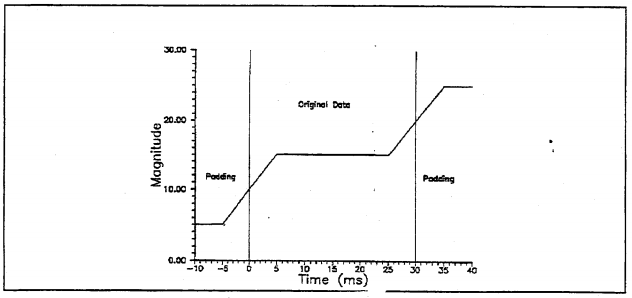
이벤트 이전 데이터를 사용할 수없는 경우 필터링 된 데이터 세트에서 필터 시작 효과를 제거하기 위해 특별한 기술을 적용해야 한다. 필터링 된 데이터의 자취는 진폭 0에서 시작하도록 강제하거나 필터링되지 않은 첫 번째 샘플 포인트의 크기와 일치하도록 강제 할 수 있다. 이 작업은 시작 지점 이후에 최소 10ms의 데이터를 복사하여 Figure C3과 같이 (0,0) 좌표 지점 또는 Figure C4와 같이 첫 번째 데이터 지점에 대해 시간 및 크기 축에 대한 복사 된 데이터를 전치하여 수행 할 수 있다. 데이터 세트의 끝에도 동일한 기술이 사용된다. 패딩 된 데이터 세트가 필터 방정식을 통과 한 다음 끝의 추가된 데이터 포인트들은 제거한다.
필터 시작을 처리하기 위해 사용자가 다른 알고리즘을 개발할 수 있다. 데이터 수집 시스템 및 처리중인 데이터 유형에 대해 추가 왜곡 효과를 인식하는 가장 적절한 시작 알고리즘을 선택하는 것은 사용자에게 달려 있다. 이벤트 이전 데이터를 사용할 수없는 경우 사용된 시작 처리 알고리즘을 표기해야 한다.
근거(Rationale) - Not applicable.
SAE 표준과 ISO 표준의 관계(Relationship of SAE standard to ISO Standard) - Not applicable.
적용(Application) - 이 SAE 권장 사항은 전체 데이터 채널과 관련된 일련의 성능 권장 사항을 간략하게 설명한 것이다. 이러한 권장 사항은 어떠한 변형도 허용되지 않으며, 이 모든 사항에 대해 시험을 수행하는 기관은 준수해야 한다. 그러나 권장 사항 준수를 입증하는 방법은 유연하며 기관이 사용하는 특정 장비의 요구에 맞게 조정할 수 있다.
권장 사항이 충족되었음을 입증하기 위해 단일 시험이 필요하므로 각 권장 사항을 문자 그대로 받아들이도록 의도하지 않았다. 오히려 단일 시험이 가능하고 수행된다면 이 문서에 대한 시험을 수행 할 것을 제안하는 모든 기관은 해당 장비가 권장 사항을 충족 함을 입증 할 수 있도록 의도 되었다. 이 검증은 부분 시험의 결과와 같이 소유하고 있는 증거의 합리적인 추론에 근거 해 실시해야 한다.
일부 시스템에서는 교정 및 확인 목적으로 전체 채널을 하위 시스템으로 분할해야 할 수 있다. 권장 사항은 전체 채널에 대해서만 작성되었으며, 이는 하위 시스템 성능이 출력 품질에 영향을 미치는 유일한 경로이기 때문이다. 일반적으로 전체 채널 성능을 측정하기 어려운 경우 시험 기관은 채널을 두 개 이상의 편리한 하위 시스템으로 취급 할 수 있다. 그러면 전체 채널 성능이 하위 시스템 결과를 함께 결합하는 근거와 함께 하위 시스템 결과를 기반으로 검증 될 수 있다.
참고 섹션(Referece Section)
SAE J670 - Vehicle Dynamics Terminology
SAE J1727 - Injury Calculation Guidelines
SAE J1733 - Sign Convention for Vehicle Crash Testing
SAE Paper 930100
Minutes of the SAE Safety Test Instrumentation Subcommittee meetings held on April 16, September 24, November 21, 1986, and June 25, 1993
NHTSA Data Tape Reference Guide(Version 4) : Volume1 - Vehicle Tests, Volume 2 - Biomechanics, Volumn 3 - Components, and Volumn 4 - Signal Waveform Generator
Developed by the SAE Safety Test Instrumentation Standards Committee
'References(자료실) > Standard & Guide(관련 기준)' 카테고리의 다른 글
| 차량 충돌하중 산정 : 가속도-시간 모델 (0) | 2021.02.15 |
|---|---|
| 콘크리트 방호벽 강도계산 (0) | 2021.02.15 |
| Estimating Occupant Risk Without Vehicle Acceleration Data (0) | 2021.01.26 |
| 차량방호안전시설 기준 개정 역사(국내/미국) (0) | 2021.01.25 |
| 노측용 차량방호울타리(가드레일) 지주 수평 지지력 산정방법 (0) | 2021.01.20 |



